5.5. Electrical Machines¶
Contents
The electrical machine library contains data useful to model electrical machines as a source for the power converter simulation and design.
Currently this library supports Permanent Magnet Synchronous Machines (PMSM) and Electrically Excited Synchronous Machines (EESM).
The machine library can be divided into 3 main interfaces that will be detailed below:
5.5.1. Library summary view¶
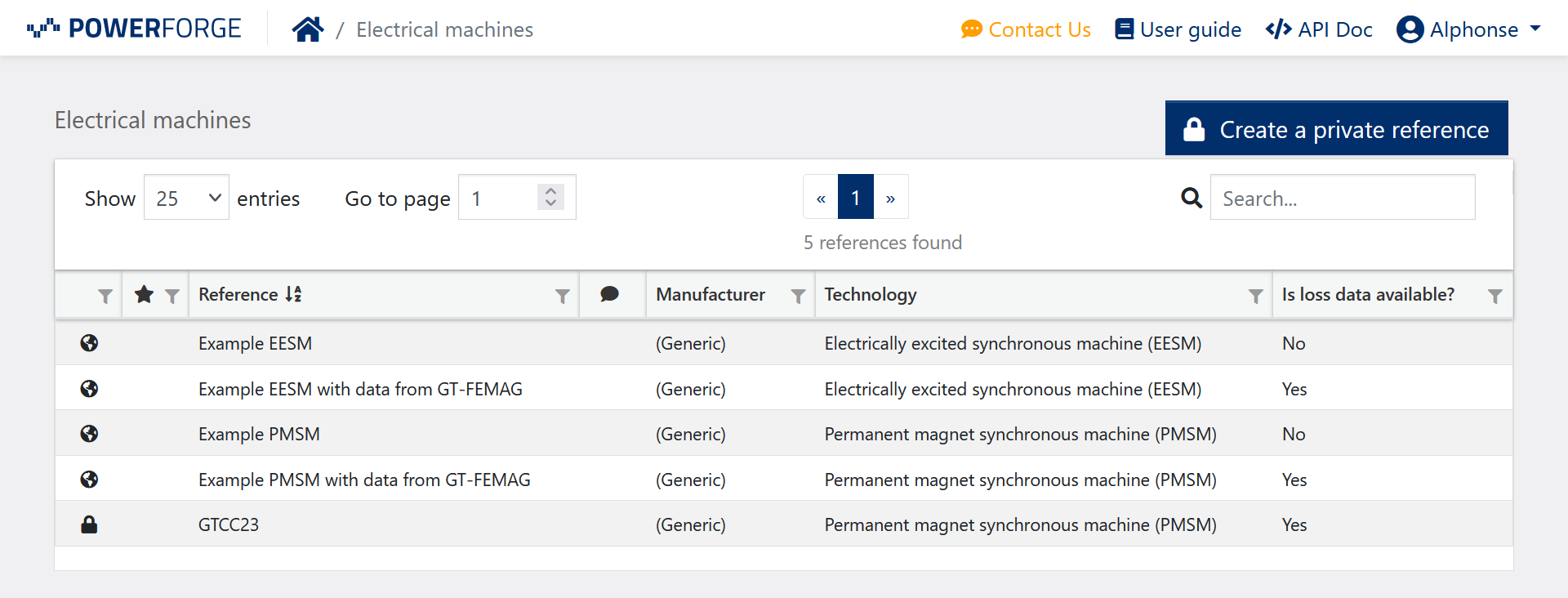
This view summarizes the elements in the library.
By clicking on a reference, the detailed view of a reference can be accessed. This detailed view is explained in this section.
By clicking on “Create a private reference”, a new library element can be created. This creation process is explained here.
5.5.2. Library detailed view¶
The detailed view of a machine in the library is itself divided into 2 main sections:
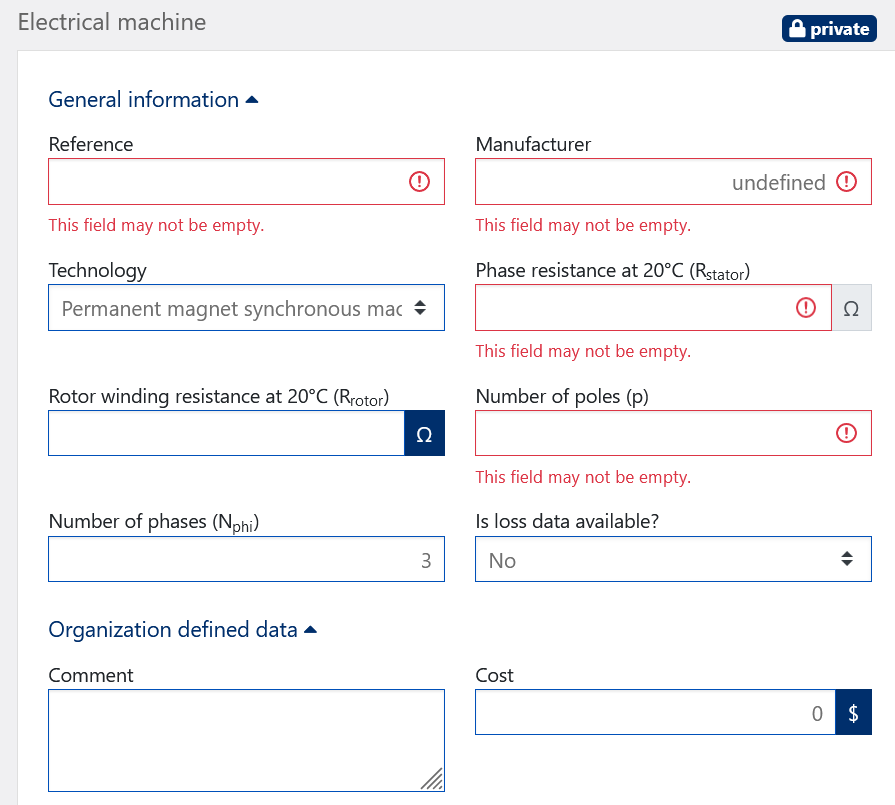
5.5.2.1. General information¶
The field in this section can be found in the picture below.
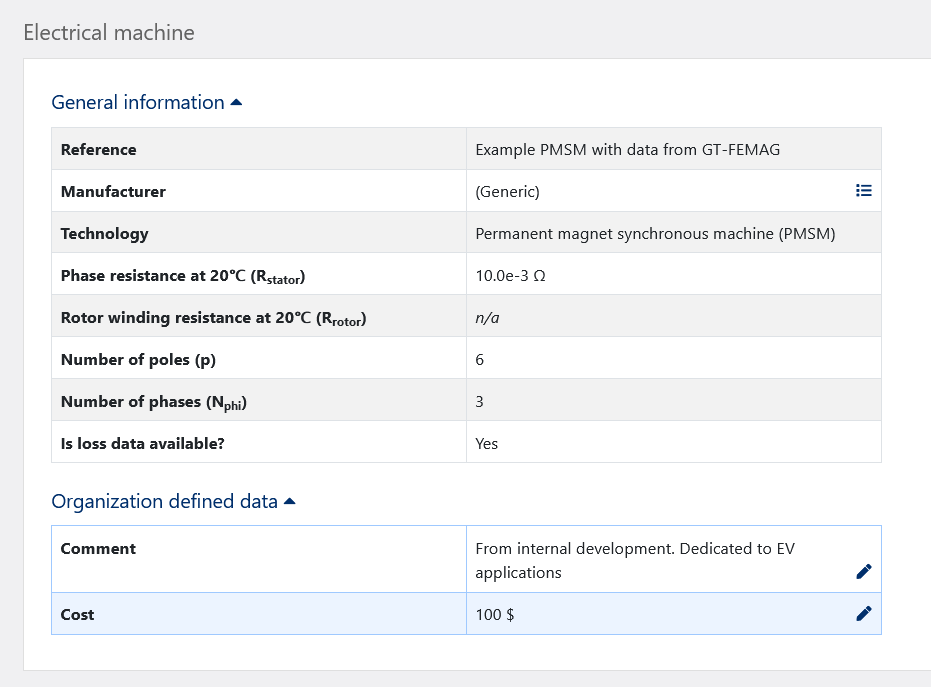
- Reference:
Name of this machine in the library.
- Manufacturer:
Name of this machine’s manufacturer. If (Generic) is used, this object has no specific manufacturer.
- Technology:
Technology of the machine.
- Phase resistance at 20ºC:
The equivalent stator resistance phase-to-neutral measured at 20ºC in DC. This phase resistance will change according to the temperature:
\(R_{DCstator}(T_{stator}) = R_{DCstator}(20°C) \cdot (1 + k_{th} \cdot (T_{stator} - 20°C))\)
With \(k_{th}=0.0039 °C^{-1}\) being the temperature coefficient for Aluminum and Copper.
In a design, an \(R_{ACstator}\) will also be calculated. This is detailed in section Electrical machine with control
- Rotor winding resistance at 20ºC:
In the case of an EESM, this field will be filled, otherwise it will be n/a.
The rotor winding resistance is supposed to be measured at 20ºC in DC. Such as the phase resistance, when this reference will be used in a design, this resistance will change according to the temperature: \(R_{DCrotor}(T_{rotor}) = R_{DCrotor}(20°C) \cdot (1 + k_{th} \cdot (T_{rotor} - 20°C))\) with \(k_{th}=0.0039 °C^{-1}\) being the temperature coefficient for Aluminum and Copper.
Contrary to the phase resistance, the rotor current is supposed to always be DC.
- Number of poles:
Electrical machine number of poles. The number of poles is two times the number of pole pairs. Minimum is 2 poles.
- Number of phases:
Electrical machine number of phases. Only 3-phase electrical machines are supported.
- Is loss data available?:
This field is boolean (Yes or No). If “Yes”, in the dataset sections (presented below), the data to estimate iron losses are stored. This field is used to assess if this electrical machine could be used to estimate iron losses. If “No”, the iron losses are not stored. Only copper losses of the machine will be estimated.
5.5.2.2. Dataset¶
In this section, the electrical machine data are presented. There are 2 distinct data displays that can be seen in the figure below:
A table representing the dataset. It can be exported as a CSV file by the user.
Two plotting areas of the dataset. These have a similar behavior as the performance analysis space.
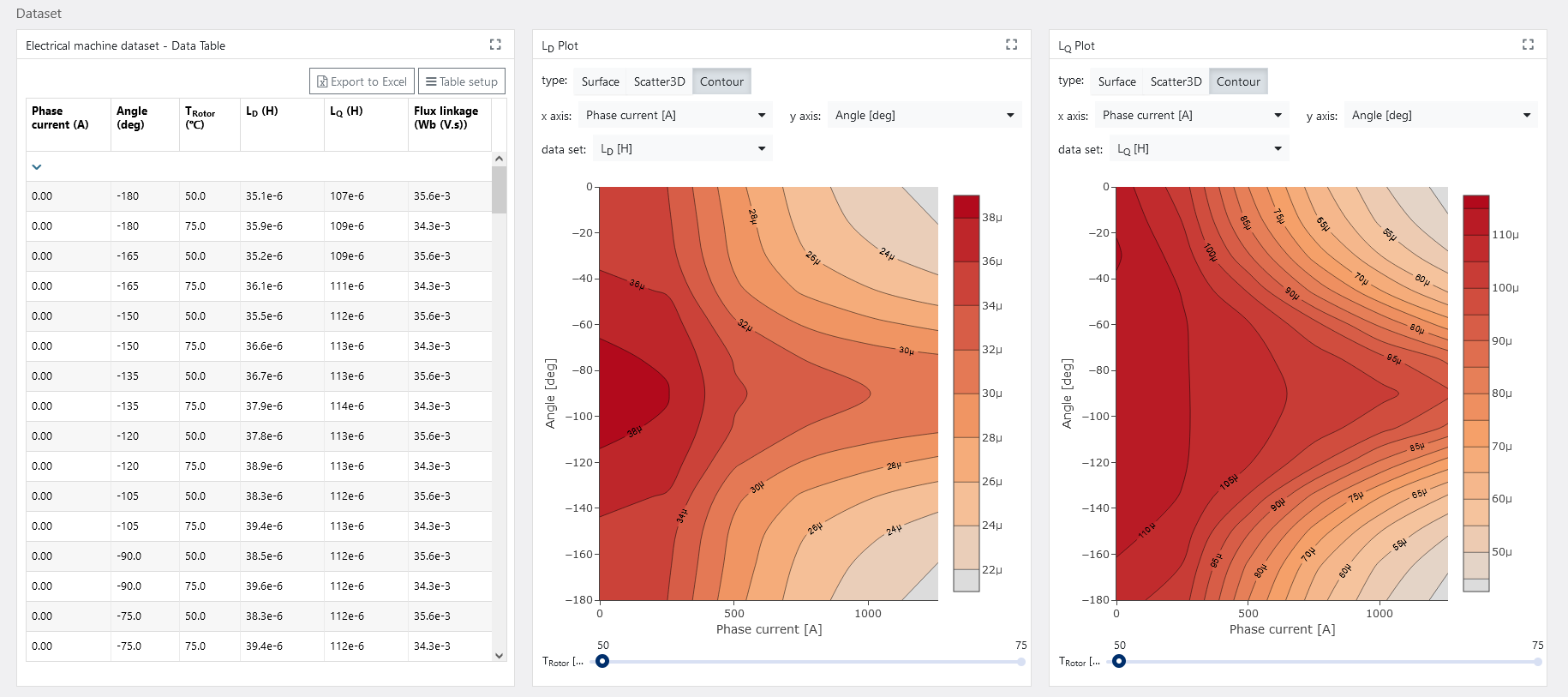
Depending on the machine’s technology and available data, the dataset can contain between 2 and 10 entry parameters and different axis.
Find below the tables to summarizes it:
Table 1: entry parameters for the data set depending on machine technology and available data
Is loss data available? |
PMSM |
EESM |
Yes |
|
|
No |
|
|
Dataset coordinates |
|
|
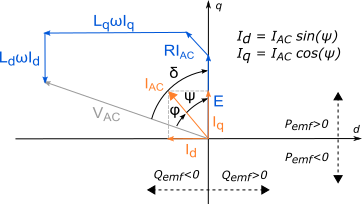
The figure below summarizes the conventions and naming of some electrical quantities.
5.5.3. Create a private electrical machine library element¶
To create a new machine library element, the user needs to click on “Create a private reference” on the main page.
Then, the user needs to fill the required fields and upload the data in the chosen format.
5.5.3.1. Fill general information fields¶
The following fields can be filled. Some of them are mandatory. The explanation of each field can be found below:
- Reference (Mandatory):
New reference name in library
- Manufacturer (Mandatory):
Manufacturer name of the new reference. If (Generic) is used, this object has no specific manufacturer.
- Technology (Mandatory):
Technology of the machine.
- Phase resistance at 20ºC (Mandatory):
The equivalent stator resistance phase-to-neutral measured at 20ºC in DC. More details can be found here.
- Rotor winding resistance at 20ºC (Optional):
The stator DC resistance at 20ºC. This field is required only for EESM reference. It needs to be left it blank if a machine other than a EESM is created.
- Number of poles (Mandatory):
Electrical machine number of poles. The number of poles is two times the number of pole pairs. Minimum is 2 poles.
- Number of phases (Optional):
Electrical machine number of phases. Only 3-phase electrical machines are supported.
- Is loss data available? (Optional):
If the uploaded data contains iron loss data, select “Yes”, if not, select “No”.
5.5.3.2. Upload Dataset¶
In this section, the user can upload the electrical machine dataset for the new reference.
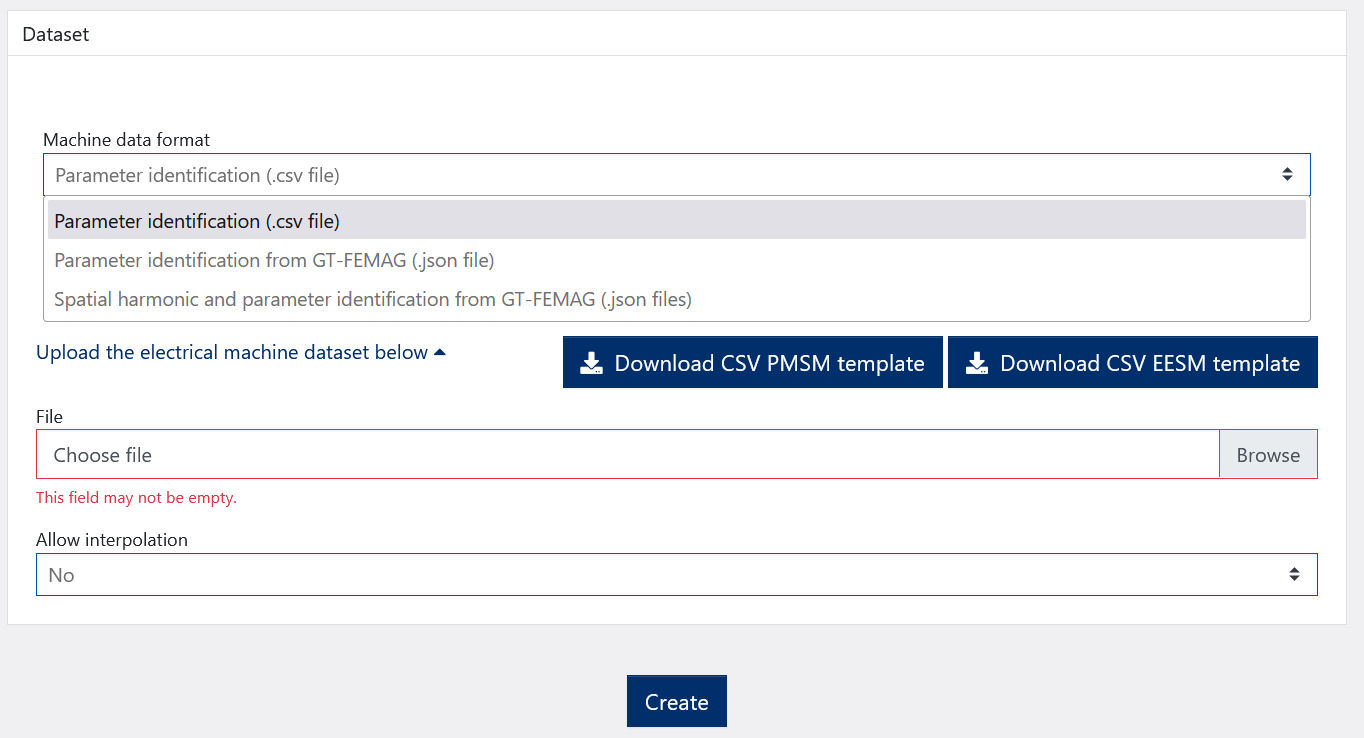
Parameter identification (.csv file):
The expected data are machine parameter maps generated by 2D or 3D electrical machine FEA tools like GT-FEMAG, etc.
The CSV files that can be uploaded depend on the machine technology of the new reference selected by the user. Example CSV files for both PMSM and EESM can be downloaded just below the “Machine data format” field.
In addition, if the provided data is not structured with a regular mesh, it’s possible to allow GT-PowerForge to interpolate the data.
The list of allowed and mandatory columns in the CSV file depending on the machine technology can be found in the table below:
PMSM |
EESM |
||||
Parameters [unit] |
Allowed column name (not case sensitive) |
Mandatory |
Parameters [unit] |
Allowed column name (not case sensitive) |
Mandatory |
|
|
|
|
|
|
Note
The column names are not case sensitive
The angle can be given in degree or radian
The Flux linkage quantity need to be given as a RMS value such as when multiplied with the pulsation it gives an emf RMS value (\(E_{RMS} = FluxLinkageRMS \cdot w\))
Parameter identification from GT-FEMAG (.json file):
The parameter identification with a .json file uses the same physical model as the one that uses a .csv file.
The upload with .json files is part of a dedicated workflow with GT-FEMAG. The user is expected to perform a machine design in GT-FEMAG and allow the parameter identification.
Once the calculation is done, the .json file can be found in the same folder as the GT-ISE simulation file.
Spatial harmonic and parameter identification from GT-FEMAG (.json files):
In addition to the parameter identification, the user has also the ability to perform the spatial harmonic data in GT-FEMAG.
Once the calculation is done, the data will be stored in a separate .json file that can be found in the same folder as the GT-ISE simulation file as well.