3.5.2. Alternative current (AC) differential-mode filter subsystem¶
This subsystem represents a differential mode filter connected to:
the macrocell(s) from one side,
an AC bus (Ideal DC & AC sources) on the other side.
The purpose of this filter is to absorb the high-frequency voltage harmonics created by the macrocell(s).
3.5.2.1. DC/AC: feasible operating points¶
The equation to determine the macrocell operating voltage depends on the filter design using the following equation:
In the AC filter case, macrocell operating point may not be feasible because of the filter impedance. Depending on the case the filter impedance needs to be increased/decreased. This problem is more detailed for the inverter case in the design algorithm section about the maximum impedance limit.

3.5.2.2. Design and electrical parameters¶
Several model variants are available:
no filter,
a 1st order L filter,
a 2nd order LC filter,
a 2nd order LCR filter.
a 2nd order dv/dt filter
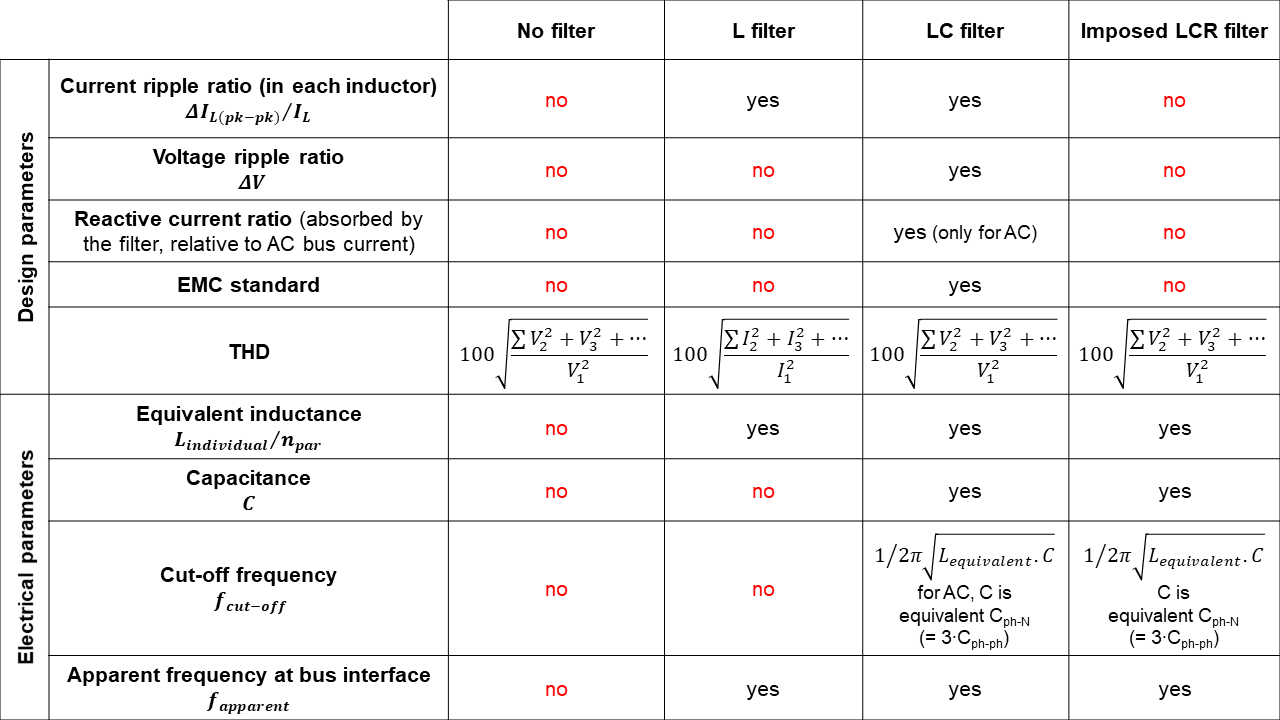
where \(V_k\) (or \(I_k\)) is the amplitude of the kth harmonic.
3.5.2.3. Design algorithm in auto design mode¶
In auto-design mode for DC-AC converters, the compatibility of AC filter and type of AC bus is only guaranteed in some cases. Refer to the next table to see which filters can be used in auto-design mode depending on the type of operating point ( ✓ = compatible, ✗ = not compatible)
Operating Point |
No Filter |
L Filter |
LC Filter |
Imposed LCR Filter |
|---|---|---|---|---|
Ideal sources |
✓ |
✓ |
✓ |
✓ |
RLE |
✓ |
✓ |
✗ |
✓ |
Electrical Machine |
✓ |
✗ |
✗ |
✗ |
3.5.2.3.1. Maximum impedance limit¶
This requirement is considered by PowerForge to check if the operating point can be reached. From the equivalent single phase circuit, a vector diagram can be obtained:
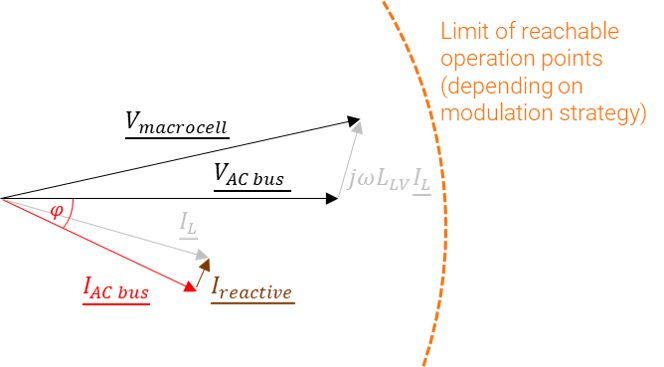
From this vector diagram, the following relation can be written:
Thus, the inductance value should respect this relation.
3.5.2.3.2. 1st order L filter auto-design¶
The algorithm computes the inductance value required to meet the specified current ripple at given operation point.
It then designs a corresponding inductor according to the selected variant’s design algorithm (see Magnetics).
3.5.2.3.3. 2nd order LC filter auto-design¶
The algorithm considers the specified operation point and several user-specified requirements to compute inductance and capacitance values.
For DC filters, the algorithm follows the same principles that are described in the high-voltage filter section.
For AC filters, the algorithm uses 3 constraints derived from user-defined specifications:
a maximum cut-off frequency which will set a minimum value for the LC product, computed from the most severe of:
the maximum voltage ripple at AC bus interface,
or the frequency-domain limit line (i.e. EMC standard) at AC bus interface;
the maximum current ripple in the inductors, which will impose a minimum capacitance value,
the maximum ratio of reactive current absorbed by the AC filter’s capacitor relative to the AC bus current, which will impose a maximum capacitance value.
PowerForge adds 2 constraints:
a maximum attenuation of the fundamental frequency by the filter, hence a minimum cut-off frequency which will set a maximum value for the LC product,
a maximum impedance (to remain able to reach the operation point), which will impose a maximum inductance value.
These constraints - which are detailed below - can be represented on a graph \(L_{LV}\) vs \(C_{LV}\):
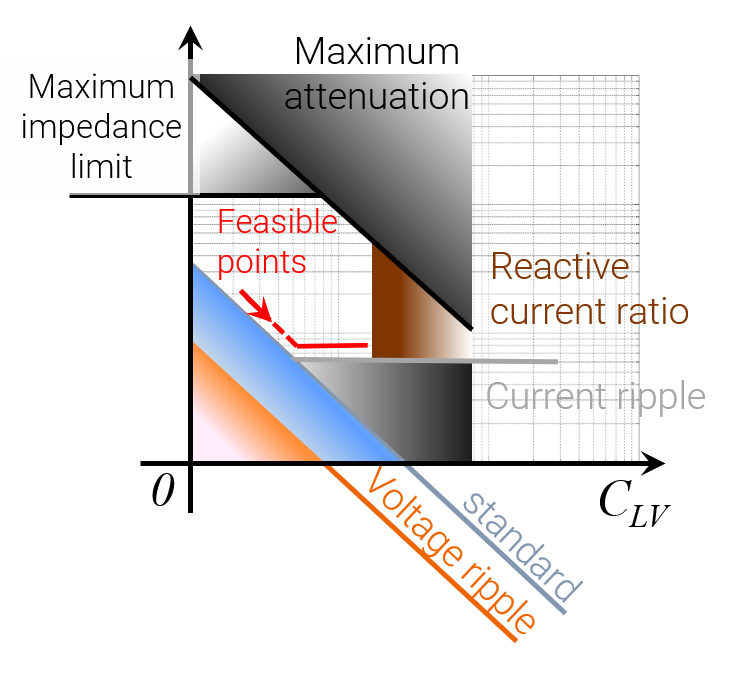
This figure shows an area of feasible points. If this area is not null, PowerForge will propose a design with the minimum inductance and capacitance values.
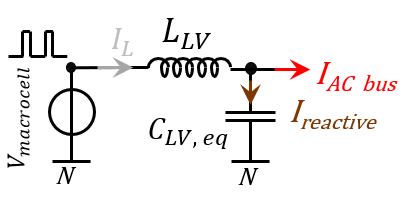
To detail some of these requirements, it will be more convenient to consider an equivalent single phase AC circuit:
3.5.2.3.3.1. Frequency requirement¶
The frequency requirement is given by \(f_c = min(f_{ripple}, f_{freq-limit})\) and imposes a minimum value for the \(LC\) product, such as:
where \(f_c\) would be the highest cut-off frequency of the filter.
3.5.2.3.3.2. Current ripple requirement¶
The “inner” ripple requirement is the current ripple requirement through the inductor. It imposes a minimum value of the inductance \(L_{LV}\).
3.5.2.3.3.3. Maximum attenuation of the fundamental frequency¶
This requirement imposes the fundamental frequency \(f_0\) should be far enough from the filter frequency, as shown in the figure below:
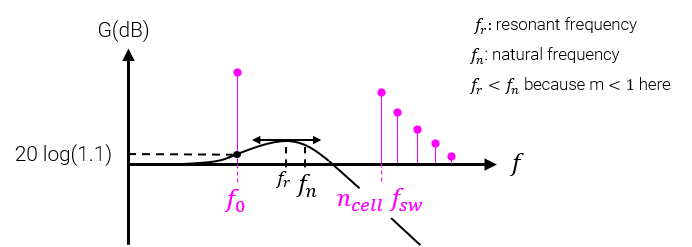
To set a minimum frequency of the filter, PowerForge considers that the filter gain at the fundamental frequency should not exceed a value of 1.1, which gives a maximum value for the LC product:
3.5.2.3.3.4. Reactive current ratio¶
This requirement imposes a maximum ratio between the reactive current absorbed by the capacitor and the AC bus current:
3.5.2.3.4. Imposed 2nd order RLC filter auto-design¶
In this kind of auto-design, the user defines the different values of the passive components and PowerForge designs the physical passive devices at the target values. In the case of the capacitor, discretization of the database can make slightly different capacitance values. The design algorithm works as follows:
Simulation in the circuit for the given L,C,R values and extraction of the waveforms each passive device is withstanding,
Design of each passive device with the user-defined target values and the waveforms computed in step 1.
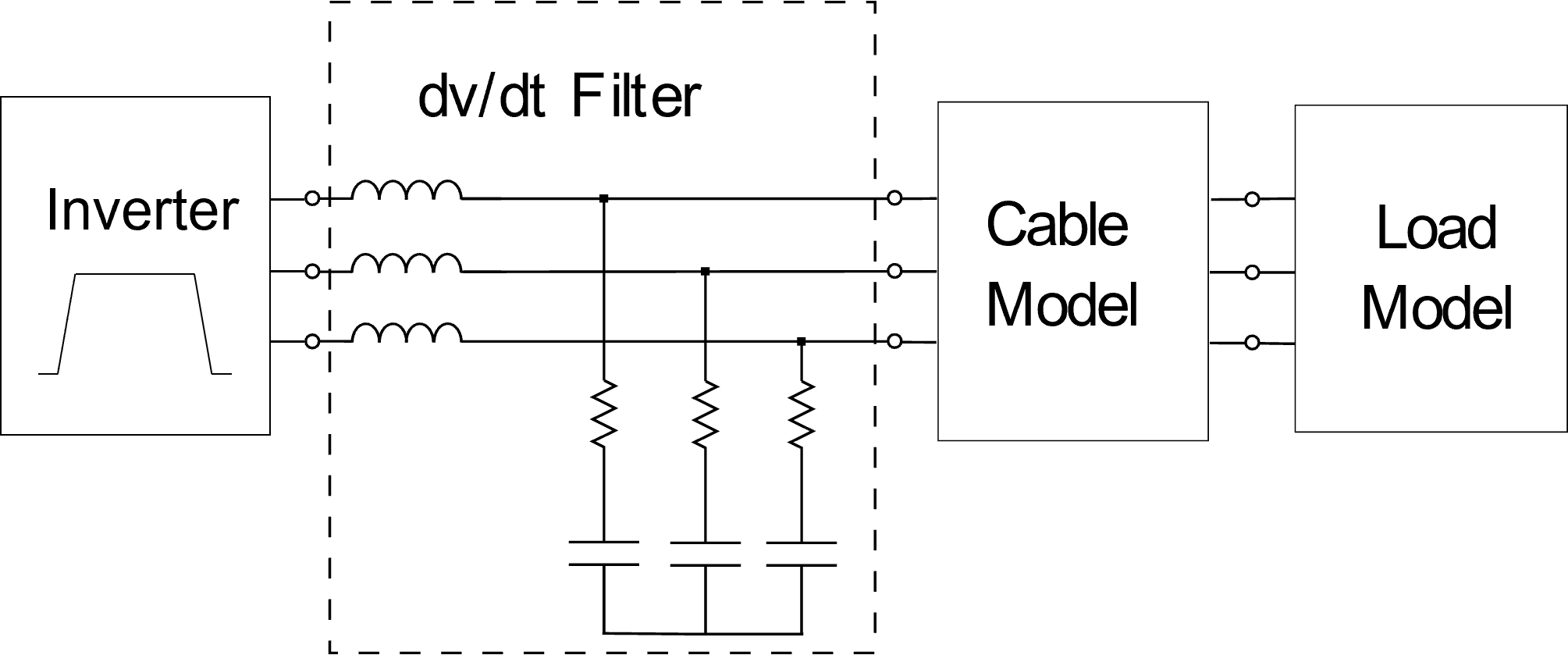
3.5.3. LCR dv/dt filter model¶
LCR dv/dt filter aim to mitigate over-voltage that appears at the motor terminals due to the switch commutation speed and the cable connecting the inverter to the motor. To estimate the motor peak voltage \(V_{peak}\), a cable and a high frequency electric motor models are used 1. The LCR dv/dt filter added in series between the inverter and the cable reduce the voltage spike and damp the ringing.
Following NEMA MG-1 2 recommendations, the voltage at the motor terminals should be no greater than:
Where \(V_{peak}\) is the zero-to-peak line-line voltage, and \(V_{rated}\) is the rated motor line-line voltage. Additionally, rise time ≥0.1 μs.
This model provides 2 simulation results:
A steady state simulation modeling a 3 phase inverter, dv/dt filter, cable model and ideal current source. This simulation is classical one of GT-PowerForge as explained in Macrocell modeling section and is used for computing the steady state current and voltage used to estimate the power transfer, semiconductor losses, etc.
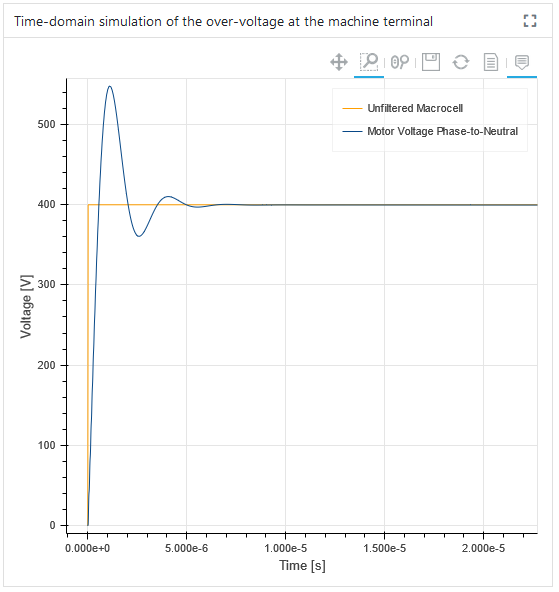
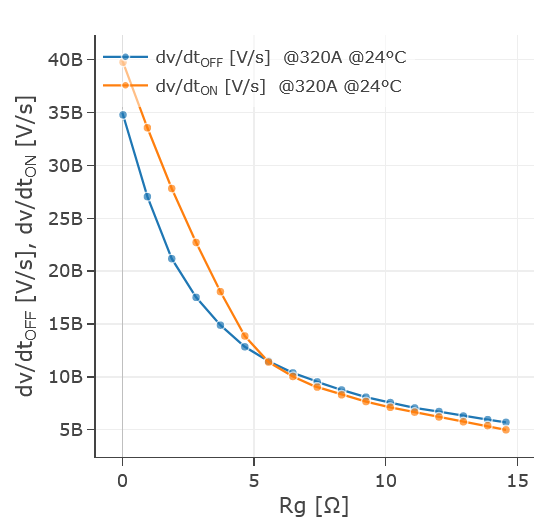
A transient simulation of a 1 phase equivalent circuit, modeling the machine as a wye-connected RL circuit as explained below. This simulation estimates the voltage peak at the motor terminals. To do so, the switch is modeled as a trapezoidal voltage source with the rise time depending on the dv/dt value interpolated from the data of switch R_G dependant model see figure below.
The filter model output provides the peak voltage \(V_{peak}\) and the filter cut-off frequency \(f_{cut-off}\). The “Time-domain simulation of the over-voltage at the machine terminal” shows the phase-to-phase motor voltage switch dv/dt.
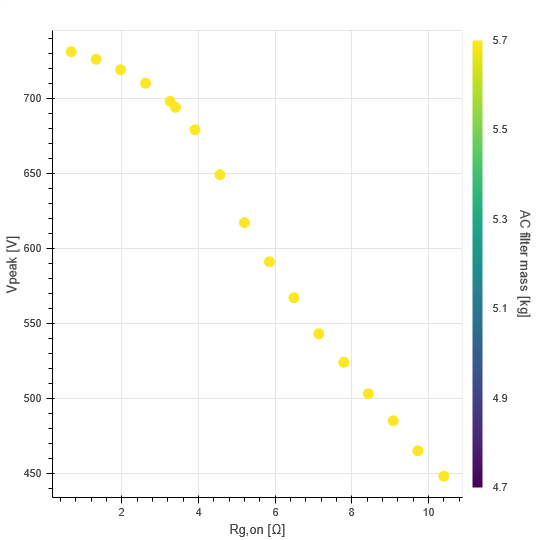
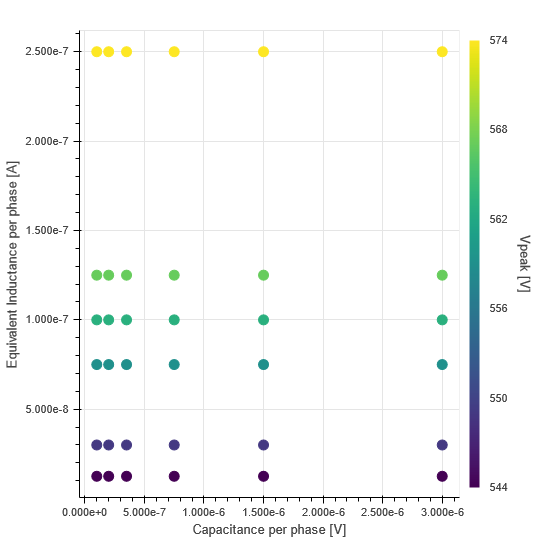
Using sweep capabilities, the Rg impact on the voltage peak can be estimated (fixing the LC filter) illustrated in the figure below (left) or L and C filter values impact on the voltage peak can be estimated (fixing the gate resistance) illustrated in the figure below (right).
|
|
(left) \(V_{peak}\) vs \(R_{G,ON}\) |
(right) filter parameters impact on \(V_{peak}\) value |
The switch dv/dt value at turn-on and turn-off is deduced from the dv/dt(Rg) switch plot. The dv/dt value is interpolated when within the specified range and extrapolated otherwise.
The LC dv/dt filter can also be used with switches that don’t have a dv/dt(Rg) curve. In this case, the overvoltage \(V_{peak}\) cannot be estimated, but the dv/dt filter will be designed.
This model can be seen more like a system that an regular AC filter. Indeed, on top of the filter, there is a cable model and an HF machine model used.
Elements modeled:
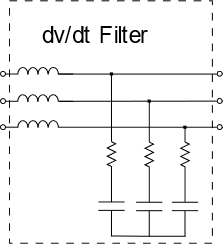
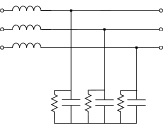
LCR dv/dt filter model
The LCR dv/dt filter is composed of a line inductance and a wye-connected capacitors bank with damping resistors. The model in itself is purely in manual mode without any Auto-designer. It is advised to first use L model and C model in order to design the filter parameters and in a second time, use the capacitor from library and EE core model for detailed design of the passive elements.
Cable model
The cable is model by a series inductance representing the inductance of the cable and a wye-connected capacitance. All cable elements are estimated by multiplying the cable length by the linear values (per-unit-length inductance, capacitance, resistance and admittance). These values can be estimated from measurement (RCL meter or impedance analyzer) 1.
High Frequency (HF) electric motor model
The electric motor is modeled by a wye-connected RL circuit where the inductance represents the motor magnetizing inductance, and the resistance represents the core loss. This parameter can be estimated from measurement (impedance analyzer) 1 or shared by the manufacturer. Very high frequency effect may not be accurately modeled with this model.
Reference
- 1(1,2,3)
A. F. Moreira, T. A. Lipo, G. Venkataramanan, and S. Bernet, “High-frequency modeling for cable and induction motor overvoltage studies in long cable drives,” IEEE Transactions on Industry Applications, vol. 38, no. 5, pp. 1297–1306, Sep. 2002.
- 2
“Motors and Generators,” NEMA. https://www.nema.org/standards/view/motors-and-generators